1. Meeting overview and key information
Present
- Neill Cox (Secretary)
- Russell Stuart (Treasurer)
- Elena Williams (Council)
- Jonathan Woithe (Council)
- Harrison Oates (Council)
Apologies
- Joel Addison (President)
- Jennifer Cox (Vice-President)
Not Present
- None.
Meeting opened at 20:03 AEDT by Neill and quorum was achieved.
Minutes taken by Jonathan
2. Log of correspondence
- [Linux-aus] Media and communication suggestion (was: Re: Flounder Feb 2026 meeting report) – Jonathan has responded to Russell Coker’s suggestion about promoting Linux.
- Missing MTA-STS Record for Domain linux.org.au – continuing to receive email enquiring about a bug bounty for notifying us of a lack of an MTA-STS record
- Re: DrupalSouth Community Day 2025 – wrapping up accounts stuff – ongoing discussion about NZ GST for conferences run there.
- From Brussels to the World: Open Source as a Global Asset – OSI newsletter
- Involvement – loomhigh223555@gmail.com from the Perth Linux Users Group would like to get involved in media and comms [Neill to respond]
- Remittance Advice – from RedBubble – $33.16 of sales
- Fwd: Stripe webhook delivery issues for https://joomla.org.au – The Joomla subcommittee have responded (by disabling the webhook)
- New subscription request to list Policies from phil@philfixit.com.au – [I don’t have the access to approves this – Neill to follow up with Joel]
- You’re Invited: OPA Meeting on Voluntary Security Attestations – from OSI. Very short notice. The meeting has already been held.
- Upcoming Domain Renewal Notice – Please Do Not Reply – for linux.com.au
- REMINDER: OPA Meeting on Voluntary Security Attestations – see above
- 30 Day Renewal Reminder 2026-03-20 – for linux.com.au
- EO2026 review document – internal EO email. I’m sure we’ll hear about it tonight.
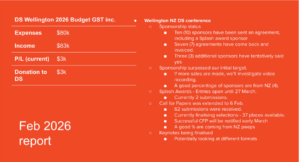
- PyCon AU 2026 update for 23 February 2026 – see below [note check with Jack before publishing minutes]
- [LACTTE] Fwd: Auto-discard notification – Neill to check
- Re: Invoices for DrupalSouth 2026 going LA-S account – Russell has responded to a query about transferring money the NZ account of Drupal South
- Linux Australia Subcommittee meeting – query from Alexar as to whether there is a subcommittee meeting coming up and who checks the secretary@ address. Neill has responded.
3. Items for discussion
- KiwiPyCon 8:05pm
No report. No 2026 conference so little to report at this stage.
- Drupal Subcommittee 8:10pm
- Joomla Subcommittee 8:15pm. Written report submitted by Nathan and discussed.
Budget status:
Initial budget for JoomlaDay Australia was shared to the Council email this evening. It’s very much in first draft form as we have the event subcommittee meeting tomorrow afternoon – let me know if any problems with the share.
Key achievements:
-
- JoomlaDay venue narrowed down to two venues in the CBD, the most likely being Melbourne Town Hall but will have confirmation of that tomorrow.
- New website close to completion, but launch looking like March now.
- Membership system now live with 5 paid members after a very soft launch at the last meeting so we’ll be promoting in conjunction with the launch of the new website.
- Small in the scheme of things but a couple of new attendees at the last User Group meeting as a result of improved communications.
Any concerns?
Not at this stage
How can LA assist?
Following tomorrow’s meeting we’ll do some work on filling in the expenses line item so would appreciate a review of that once complete, which is likely around Council’s next meeting.
- Admin Team 8:20pm
No reportthis month – calendar invite not received.
- PyConAu 8:25pm
No verbal report. Jack sent a written report through earlier this week.
-
- CFP has been launched
- Attended DDD Melbourne. Should drive interest in CFP and conference, but unlikely to convert to ticket sales any time soon.
- CFP workshops scheduled – in person Sydney, Melbourne, Brisbane and Canberra plus two online.
- Accepted into Python Software Foundations new “Community Partner” program
- WordPress 8:30pm
No report this month.
- Everything Open 8:35pm
-
- Projected profit of a bit more than $35,000
- Photos – Query about where these could be archived long term. Yes, on the LA mirror. Check with Steve about what might be best.
- Streaming costs – Query about who pays the streaming costs: the conference or LA. Need to ask Joel for these details and finalise costs for the conference if applicable.
-
- Flounder 8:35pm
No report this month.
- LUV 8:35pm
Alexar is travelling and is unable to attend tonight. He expects to send us a report by the end of the month.
4. Items for noting
- ANZ New Zealand: adding signatories
- ANZ NZ have requested signatures from everyone on the manifest in order to add David and Christopher. The list on the manifest appears to be out of date.
- Russell will ask ANZ NZ for more information since this appears to be a new procedure.
5. Other business
- Grants program ready to roll, pending two details:
- The sender address to use when posting applications to the linux-aus mailing list.
- Subscribing that sender address to linux-aus.
In response to the point raised at the last Council meeting: during the last grants cycle the information about the program was made visible to everyone, even those not logged in as members.
- LUV/Electron workshop emails
- A LUV (Linux Victoria) AGM has been scheduled. Information about this is expected in Alexar’s report.
- Detailed discussion of next steps deferred until Joel is back.
- Council Face to face: council members to fill in the dates document:
6. In camera
- None.
7. Action items
- treasurer@linux.org.au – contact ANZ re nominated signatories
7.1 Completed Items
secretary@linux.org.au-email to Arjen – re EO2027 bid
jwoithe@just42.net – respond to the email about the LA Press/Media team_
ele.wil@gmail.com-create a planning document for the face to face council meeting
7.2 Carried Forward
secretary@linux.org.au– send email asking for EOI for EO2027 and EO2028
secretary@linux.org.au– create a document to plan how to manage verification of in person AGM members
president@linux.org.au-update contacts for meeting invite.
Meeting closed at 21:09 AEDT
Next meeting is scheduled for 2026-03-11
